1. 系统介绍
本项目研制的超冷原子干涉陀螺仪,以现代战略武器的完全自主导航需求为背景,旨在提供更高灵敏度和更好稳定性的角速度测量设备。相较于光学陀螺仪,原子陀螺仪由于其物质波属性,具有更高的理论角速度分辨力。为了充分发挥原子陀螺仪的理论优势,要尽可能利用原子的物质波属性。超冷原子由于其极低的动能分布和高度相干的性质,非常适用于高精度测量,被视为最有可能发掘出原子干涉仪潜力的载体。由于超冷原子的制备和操控都有较高技术瓶颈,目前该领域的陀螺仪正处于起步阶段,尽管现有的超冷原子陀螺仪角速度分辨力普遍不高,但仍具有很广阔的前景。
本系统基于原子赛格纳克(Sagnac)干涉技术,再结合四极磁阱的磁托举技术,使原子干涉陀螺仪的灵敏度突破3×10⁻5 rad/s。本项目创新性地结合超冷原子、Bragg晶格脉冲、磁四极阱轨道导引等技术研制出了小型化高精度陀螺仪,在角速度精度与系统机动性提升、物质波干涉机理的突破等方面都具有重要科学意义。此外,得益于静磁阱的低噪声,本仪器实现了国际领先的单位面积角速度灵敏度。

图1、超冷原子干涉陀螺仪系统
2. 原子干涉信号的测量
基于系统在前级步骤制备并装载到磁阱中的BEC,我们首先打一束Bragg脉冲使原子团分束并运动到轨道中;当原子恰好运动到离势阱中心最远时,打第二束Bragg脉冲,这束脉冲光与第一束垂直,从而使得原子获得动量在四极磁阱中绕中心进行圆周运动;在原子团运动整数圈后回到分束前的位置时,再打第三束脉冲光使原子部分回到0动量态上,而0动量态上原子数的比例就包含了我们需要的相位信息。实验过程中上下两团原子都相当于进行了一次干涉的测量,通过差分的处理可以消除很多共模噪声;再基于Sagnac效应,我们就可以从测量结果中计算出相位差并得到角速度的测量结果,本系统在经过几个小时的测量后最终角速度分辨力高于3×10-5rad/s。

图2、原子干涉的示意图
3. 蒸发过程中的磁选态过程
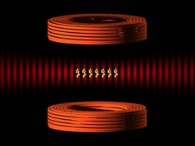
由于本系统采用四极磁阱来束缚原子进行干涉测量,只有特定磁子能级(mF=-1)的Rb87原子才能被束缚到阱中,因此我们需要尽可能多的制备处于-1态的Rb87原子。为了实现这个目的,我们在光阱蒸发冷却的过程中开启了四极磁场和偏置磁场,通过调节磁场的开启时间、梯度大小、中心位置等多个参数,我们可以改变蒸发得到的BEC中不同磁子能级原子的比例,实验中我们可以使-1态原子的占比从1/3提高到97%以上,并对相关过程进行了理论分析和建模。下图给出了在磁选态过程中三个不同参数下,BEC中原子在不同磁子能级间的分布,可以看出c图对应的磁选态过程成功使绝大多数原子都处于-1态。

图3、磁选态过程对BEC中原子磁矩的改变